编译&运行¶
在Ubuntu 22.04下编译Rocos¶
在安装好系统后,配置源,可以参考清华源,选择对应版本后更改软件源配置文件
/etc/apt/sources.list。更新源并安装Rocos所需要的依赖
sudo apt update sudo apt install git cmake build-essential libgl1-mesa-dev libode-dev qtbase5-dev qtdeclarative5-dev libqt5serialport5-dev libtolua++5.1-dev libeigen3-dev protobuf-compiler libprotobuf-dev qml-module-qtquick* qml-module-qtgamepad libfmt-dev
完成源代码的下载和编译
git clone https://github.com/Robocup-ssl-China/rocos.git cd rocos mkdir -p build cd build cmake .. cmake --build . --config Release --parallel `nproc`
完成编译后在
ZBin文件夹下找到Client/Core/Controller三个可执行文件Client为客户端,为比赛和日常测试的主要操作软件Core为核心策略软件,可以从Client界面启动,无需手动从终端启动Controller为机器人硬件测试软件,可以使用手柄或键盘进行单机器人的功能测试
假如你对于c++工程的编译流程不熟悉,可以参考如下规则:
只对
lua_scripts中的lua代码进行修改,无需重新编译,直接在Client中重启Core即可对已有的
c++代码进行修改,则需要执行cmake --build .或make进行重新编译对
.pkg文件或.proto文件进行了修改,或新建c++相关文件,则需要从cmake ..指令开始对工程进行重新构建
如果你想体验最新的功能,可以使用如下指令将工程切换到dev分支
# 在rocos文件夹下执行
# 从远程仓库拉取最新的dev分支
git fetch origin dev
# 切换到dev分支
git switch dev
警告
dev分支可能会有一些测试不够完备的功能,如果在使用中有任何问题,欢迎给Rocos提交issue或者PR。
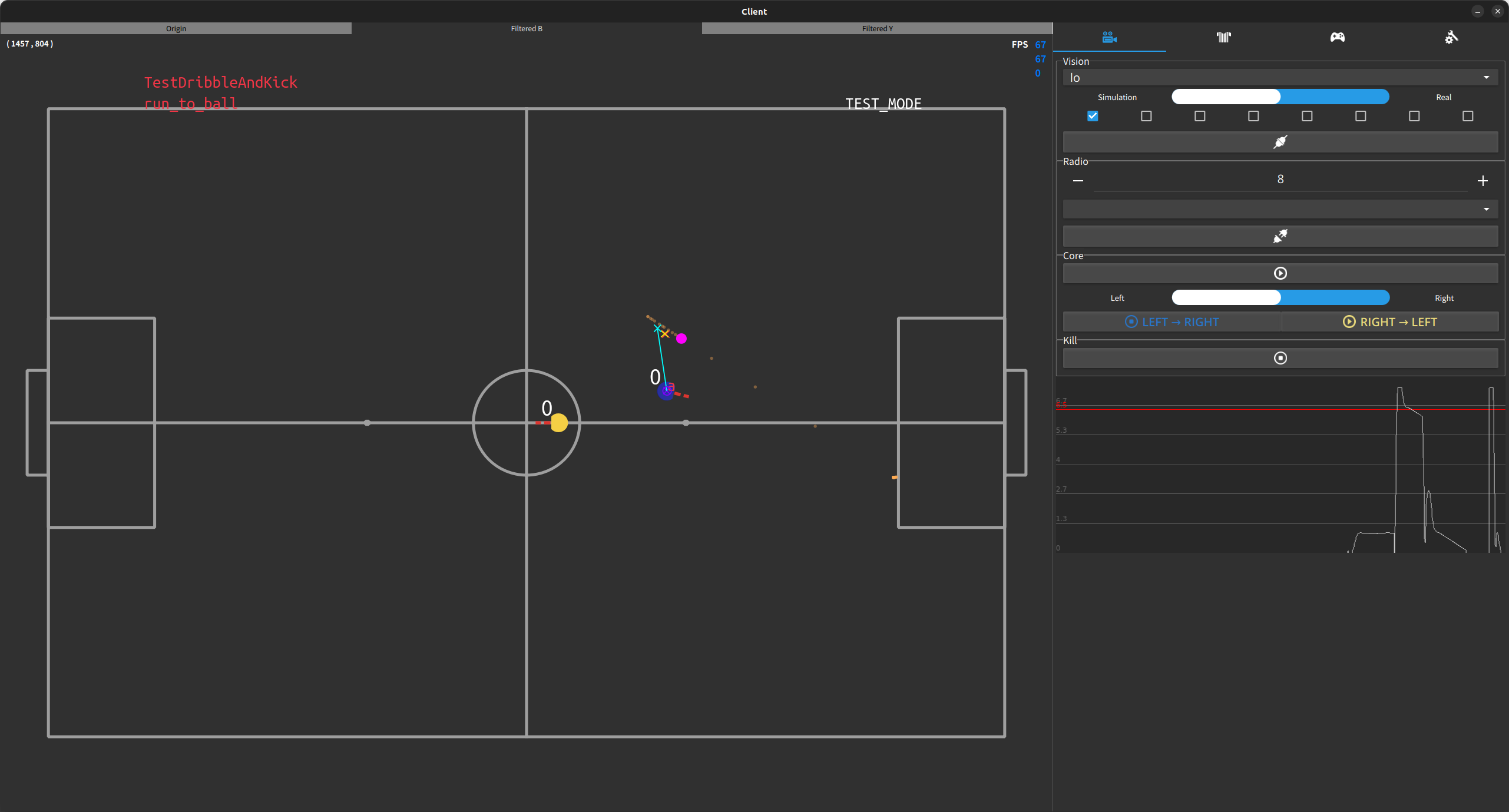
运行Rocos¶
在终端下进入ZBin文件夹,启动Client软件,点击Vision内的连接按钮,敲击键盘的快捷键1和Ctrl+1,再点击带有蓝色字LEFT → RIGHT的启动按钮可以看到机器人在运动。
# 假设在build文件夹下编译通过,先进入ZBin文件夹
cd ../ZBin
# 启动Client
./Client