Rocos模块架构¶
在上一篇内容中,我们已经了解了小型足球机器人比赛以及基本的架构。Rocos目标是帮助参赛者轻松构建核心策略系统,本文将对Rocos的架构进行介绍。
SSL软件架构与Rocos¶
让我们从更细致的角度来看Rocos的模块分布:
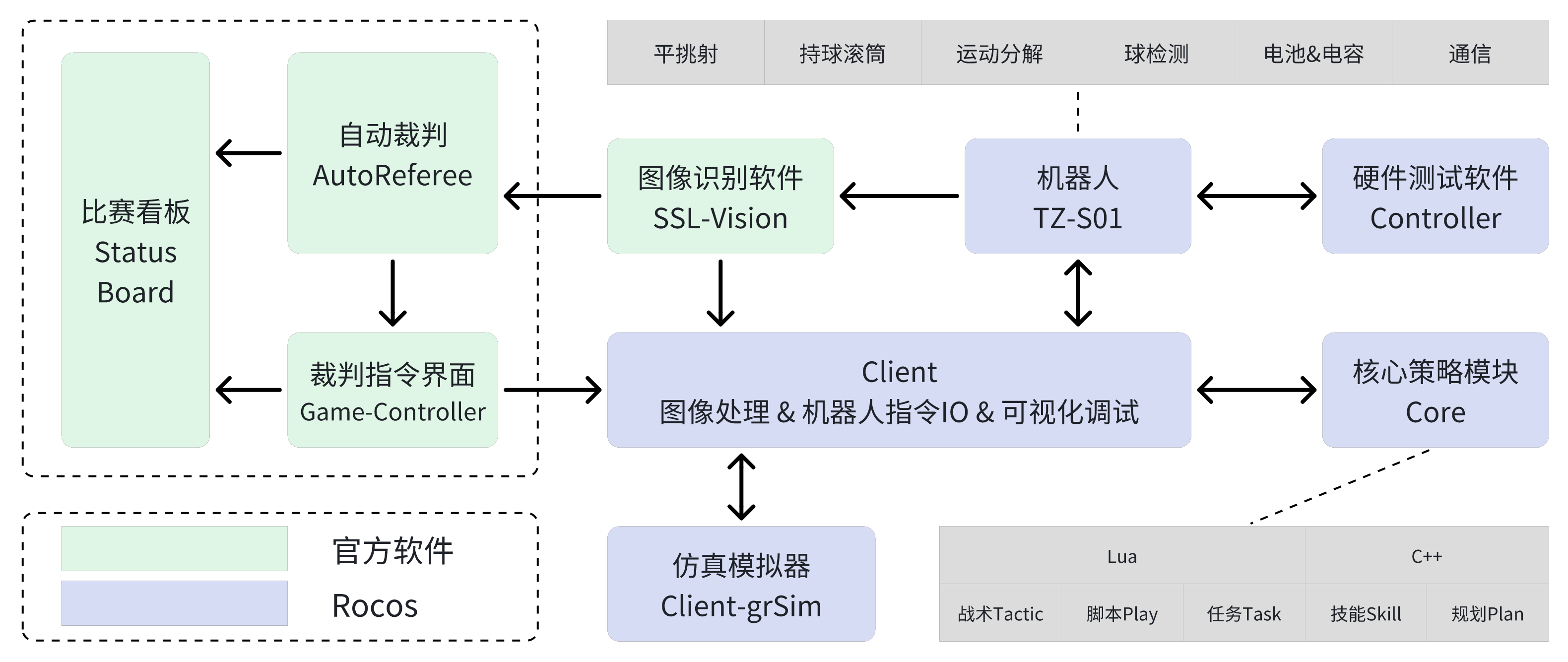
上图可以粗略拆分成两部分,左侧虚线框内是官方提供的辅助软件,一般只会在比赛时运行负责裁判指令以及可视化等功能。图右侧展示了Rocos的模块拆分,图中的每个箭头代表了模块间的通信数据流。为了更清晰的展示架构,图中并没有以软件包或进程的方式进行构建,而是以功能模块的方式进行了拆分,箭头所代表的数据流包含了进程的网络通讯、线程间的内存共享等不同方式。
Client客户端: Client作为Rocos系统中的图形界面,同时也是唯一与Core通讯的模块,负责处理除了策略外的所有功能,包括与机器人的通讯、裁判指令的接收、图像接收及融合、可视化、调试、LOG回放等功能。
Client-grSim仿真: grSim是RoboCup小型组官方提供的仿真软件,最初来自于伊朗Parsian战队的开源项目,后被RoboCup小型组官方收编。Client中嵌入了一个精简版的grSim,包含了grSim除界面的所有功能,方便在Client中进行仿真测试。如果做类比,可以在功能上简单理解成
grSim ≈ SSL-Vision + Robot。Core: 核心策略模块,无图形界面,由lua和c++共同构成。由上至下可以拆分成战术Tactic/脚本Play/任务Task/技能Skill/规划Plan五层。
战术Tactic: 由多个脚本Play以及配套的Task和Skill组成,构成一个宏观的战术风格或打法策略,例如:可以根据不同对手的风格,选择不同的战术进行针对性决策应对。
脚本Play: 基于Task和Skill构建出多机器人配合策略,每个Play实际是一个有限状态机(Finite State Machine),每个状态是一个任务组定义了每个机器人的具体任务。在比赛中,根据状态机的状态跳转可以实现类似于进攻与防守的转换。比赛中的定位球、点球等对裁判指令的响应是通过不同Play间的切换实现的。
任务Task: 任务是结合辅助策略模块对机器人各种泛化的Skill的具体封装。例如:利用
移动这个Skill,配合防守模块的具体计算结果,可以实现对防守阵型中各个角色的任务封装,供Play进行拼装。技能Skill: 技能是对机器人的上层控制,一般会利用机器人的底层控制进行封装,例如:
移动、射门、传球、拦截等。规划Plan: 规划是对机器人的轨迹规划,负责将上层
Skill的目标转化为底层控制的目标,例如:移动技能的目标是一个点,规划模块负责将这个点转化为机器人的速度和角速度。
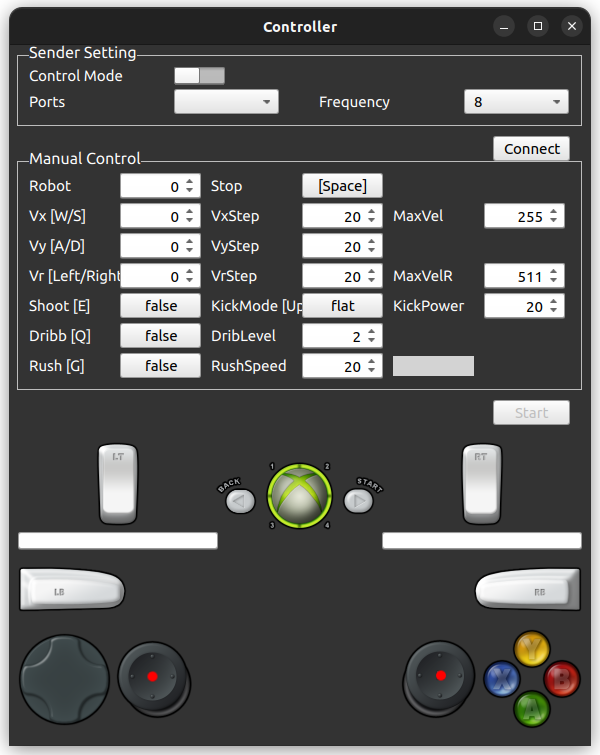
Controller软件: Controller是一个单机测试软件,一般独立运行用于机器人硬件的调试。可以使用键盘或者手柄控制机器人的运动,同时可以查看机器人的传感器数据、调试机器人的底层控制等。
为什么Core不直接与机器人通讯/为什么Core只和Client通信?
在编写机器人算法时,我们通常希望代码的重用性变高,因为我们希望弱化
Core对于仿真和实物机器人的差异,所以我们希望Core的代码尽量不涉及到具体的通讯细节而采用相同的机器人指令协议。由于
Core是一个无图形界面的软件,所以我们希望图形界面可以调试和可视化所有信息,机器人指令也作为一个重要信息需要发送给Client。由于策略是用户最常更改的模块,也是较为容易出现崩溃的模块,我们希望可以解耦策略模块与其他模块,让Client可以为Core做进程守护而维持各个数据流的状态。