Skill - 链式调用¶
对于lua的策略来说,一个task只对应一个skill,但一个skill通常是可以继续拆分。除了速度规划本身,几乎任何skill都可以最终拆分成一个机器人到达某个位置的问题。这种拆分的方式,可以让我们更好地复用代码。链式调用是一种常见的拆分方式,通过链式调用,我们可以将一个skill拆分成多个子skill,每个子skill负责一个小的任务,最终完成整个skill的任务。
1#include "MyTouch.h"
2void MyTouch::plan(const CVisionModule* pVision){
3 setSubTask("SmartGoto",task());
4 Skill::plan(pVision);
5}
在之前的小节中,我们在skill的书写时使用了一个setSubTask("SmartGoto",task());,这就是一个最简单的链式调用。在这个例子中,我们将SmartGoto作为子skill,task()作为参数传入。在SmartGoto中,在做完路径规划之后会继续调用速度规划的Skill-Goto,这样就形成了一个链式调用。
setSubTask的使用¶
setSubTask是一个在Skill中的函数,它的定义如下:
// skillbase.h
void setSubTask(const std::string& name, const TaskT& task); // 设置子任务
setSubTask的作用是设置一个子任务,这个子任务会在当前任务执行完毕后继续执行。在setSubTask中,我们需要传入两个参数,第一个参数是子任务的名字,第二个参数是子任务的参数。在setSubTask中,我们会将子任务的名字和参数保存在PlayerTask中,等到当前任务执行完毕后,会通过Skill::plan(pVision)调用基类Skill的函数继续执行这个子任务。
setSubTask的TaskT参数¶
1// misc_types.h
2struct TaskT{
3 TaskT() : executor(0){ }
4 TaskT(const int executor) : executor(executor){ }
5 int executor; // 执行任务的队员号码
6 PlayerStatus player; // 队员的状态
7 stBallStatus ball; // 球的状态
8};
上面的代码是TaskT的定义,TaskT是一个结构体,它包含了一个executor和两个状态,player和ball。在setSubTask中,我们传入的参数就是TaskT类型的,这个参数会在子任务中使用。在子任务中,我们可以通过这个参数获取到当前的队员号码,队员的状态和球的状态,这样我们就可以根据这些信息来做一些决策。关于机器人和球的状态的定义,可以在misc_types.h中找到。
setSubTask的使用场景举例¶
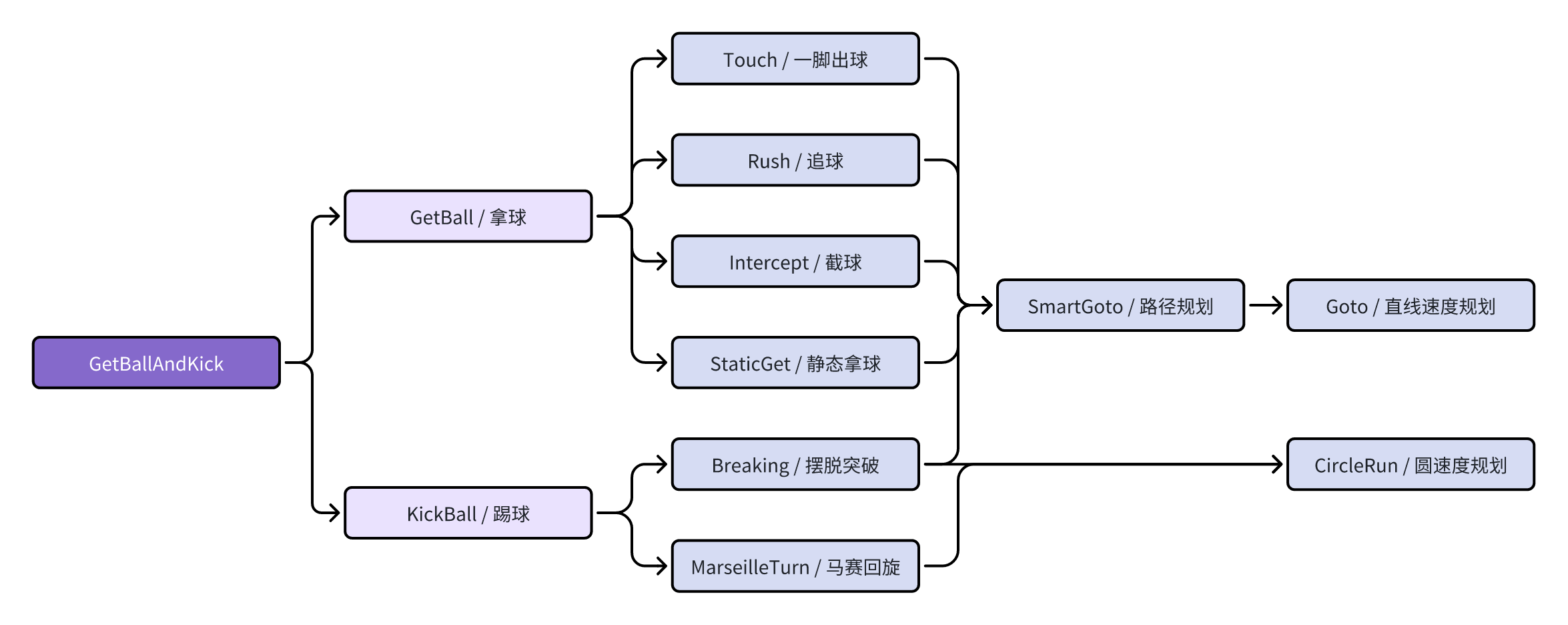
我们以实际策略中的单机器人的拿球后踢球GetBallAndKick为例,来说明setSubTask的使用场景。在这个例子中,我们需要机器人拿到球,并将球踢出。这个任务可以拆分成两个子任务,一个是拿球,一个是踢球。在拿球时,由于球的运动方向以及最终踢球任务的目标朝向不同,可能存在截球/追球/静态拿球/逼抢等不同情况。在踢球时,可能会调用动态摆脱/推球转身/马赛回旋等有特色的技能来完成球的转移。这些情况可以进一步交给不同子任务来完成并在GetBall中整合,最终完成整个任务。而整个过程中,都会用到避障、路径规划等技能,所以最终的链时调用可能会是这样的:
总结¶
链式调用是一种常见的拆分方式,通过链式调用,我们可以将一个skill拆分成多个子skill,每个子skill负责一个小的任务,最终完成整个skill的任务。在实际的策略中,我们可以根据任务的复杂程度,将任务拆分成多个子任务,通过链式调用的方式来完成整个任务。这样可以更好地复用代码,提高代码的可读性和可维护性。